
与人工智能系统集成的人形机器人的出现有望在教育、医疗保健、工业自动化和危险环境操作等不同领域实现变革性应用,显著改变人机交互。虽然全球人形机器人市场预计将从2023年的13.2亿美元扩大到2030年的41.2亿美元(复合年增长率:17.3%),但开发智能人形机器人的一个关键挑战是为它们配备强大的感知和识别能力,这对有效的环境交互至关重要。
以人类指尖敏感性为例的生物触觉感知涉及专门的机械感受器:用于静压检测的慢自适应(SA)感受器和用于检测高频振动的快自适应(FA)感受器。这种双模机械传导通过互补的静态变形分析和频谱振动解码实现了纹理识别。值得注意的是,SA受体,特别是位于指尖表面附近的默克尔盘(MD),提供了对辨别物体形状至关重要的高分辨率静力检测,而FA受体,主要是分布在指尖深处的帕西尼小体(PC),主要测量动态振动。这两种受体类型对于纹理识别都至关重要。受这种生物结构的启发,已经开发出灵活的人工触觉传感器来模拟SA和FA受体的功能。感知和识别精细表面特征(如粗糙度或纹理)的一个关键挑战是实现快速响应和松弛速度,以及对静力和动态振动的高灵敏度。触觉传感器需要高灵敏度来检测微观表面特征的微弱刺激,同时需要快速响应和松弛率来解析特征表面拓扑结构并捕捉微妙的高频振动。然而,在单个传感单元内同时实现快速响应能力和静力和高频振动的双重感知仍然具有挑战性。目前,最常见的策略是将分别基于压阻(或电容)传感器和摩擦电(或压电)传感器的SA和FA模拟受体集成到多层器件结构中,这需要通过单独的电路进行信号收集和处理。尽管使用这种集成方法取得了重大进展,但几个关键问题仍然存在:i)多层结构导致设备又厚又笨重,增加了剪切破坏的敏感性;ii)通过单独的信道处理多个信号使实际应用中的数据分析复杂化;iii)信号之间的潜在串扰会降低识别精度;以及iv)基本感测性能和整体识别能力之间的关系尚不清楚。因此,迫切需要使用简化的传感设备和电路提供高度灵敏的触觉感知和表面纹理识别的智能传感系统,以促进直接的数据处理。
本文亮点
1. 本工作报道了一种仅基于压阻原理的织物压力/触觉(PT)传感器,该传感器对高频振动和静力具有高灵敏度和快速响应。这些特征归因于传感器的3D多尺度架构及其蜂窝状传感织物的相应分层结构变形。
2. 作为与人形机器人和假肢相关的概念验证应用,通过将PT传感器与机器学习算法、假肢设备、工业机器人手臂和图形用户界面集成,构建了一个自动表面纹理识别系统。
3. 这种人工感官系统能够学习不同的物体特征,区分精细的表面纹理,并随后在宽范围的扫描速度(50-300 mm s-1)下以高识别准确率(>98.9%)对未知纺织品进行分类。
图文解析
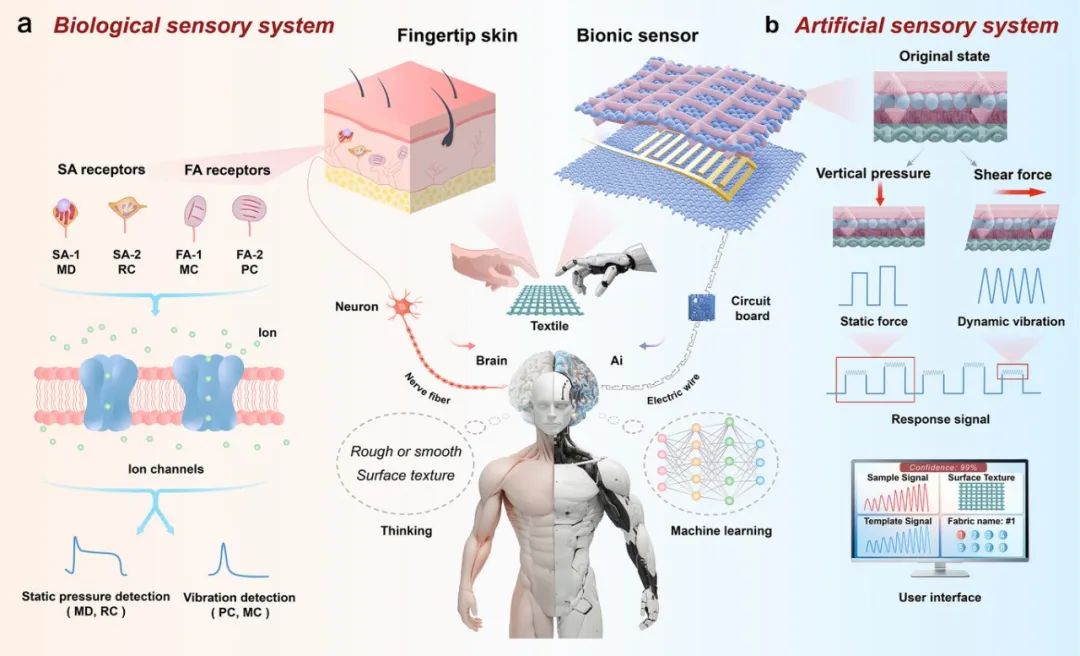
图1. 模仿人类触觉感知的仿生感觉系统的概念。(a)生物和(b)能够检测静态和动态力的人工感觉系统。
图2. PT传感器的制造、材料表征、传感性能评估和潜在应用。a)MXene/PEDOT的制造:PSS涂层蜂窝织物。b)构成不同编织结构的导电织物的光学图像:(i)MPHMF4,(ii)LHMF4,(iii)SSHMF4。比例尺:2毫米。c)MPHMF4传感织物的3D光学图像和d)SEM图像。e)电流-电压(I-V)曲线,f)电流响应,g)不同静压下MPHMF4传感器的相应计算灵敏度。h)传感器在1Pa下的响应和恢复时间。i)用于操纵LED显示器亮度的压力控制开关。
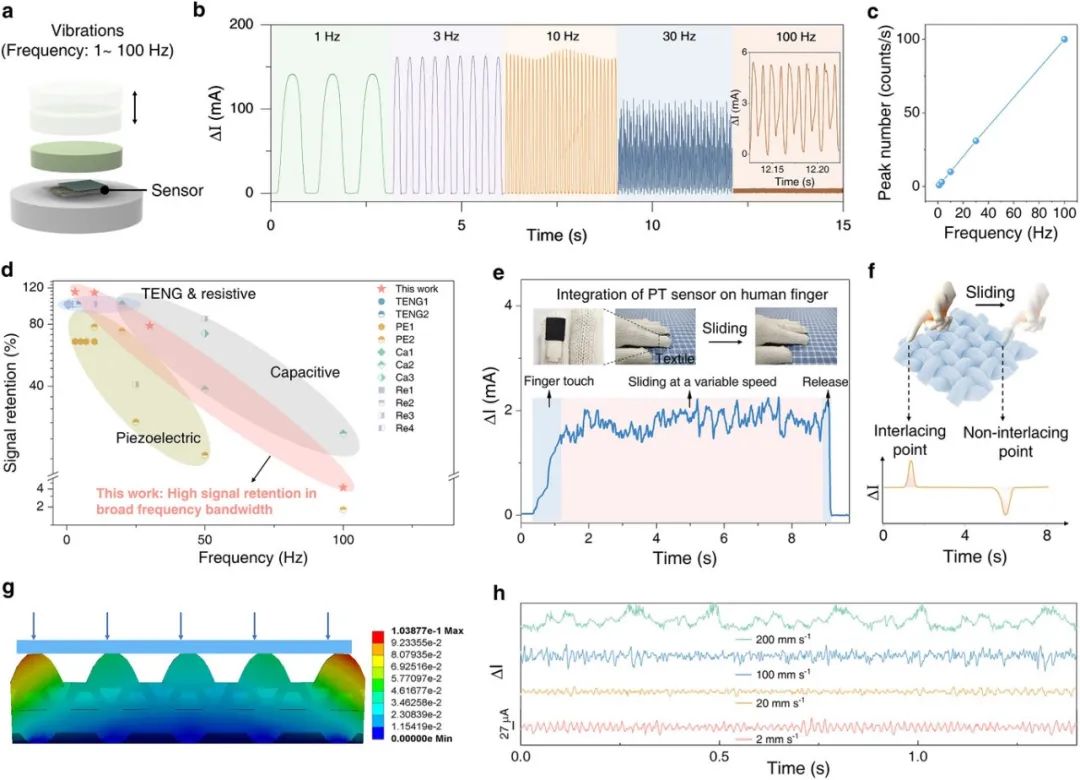
图3. 织造结构依赖的传感性能和压力感知优势。a)作为压力函数的MPHMF4、LTHMF4、SSHMF4和LHMF4的相对电流变化。b)在3kPa的加载压力下,对MPHMF4、LTHMF4、SSHMF4和LHMF4内的压缩应变分布进行有限元建模。c)MPHMF和先前报道的仿生结构压阻式传感器的压缩传感性能比较。(d)雷达图综合比较了所提出的传感器在灵敏度、传感范围、检测限、响应时间、可扩展性和渗透率方面的传感性能与其他压阻传感器的传感性能。e)MPHMF4传感器在24000次装载/卸载循环中的可靠性。
图4. 所提出的PT传感器的动态传感能力和相应机制。a)示出用于振动检测的设置的示意图,b)所提出的PT传感器的响应曲线,以及c)在1-100Hz范围内峰值数量和振动频率之间的对应线性关系。d)将所提出的PT传感器的振动检测性能与基于摩擦电(TENG)、压阻(PE)、压电(Re)、电容(Ca)机制的其他触觉传感器进行比较。e)整个感测过程包括手指触摸、滑动和释放,以及f)相应的信号生成机制。g)在100 Hz的3 kPa振动载荷下,对MPHMF结构内的压缩应变分布进行有限元建模。(h)通过在织物上以四种不同的滑动速度(2、20、100和200 mm s-1)滑动PT传感器获得的电流信号。
审核编辑 黄宇










